控制算法-路径跟踪
概述
本文介绍常见几种路径跟踪算法,并分析各自的优势。目前主要分为基于几何关系控制设计和基于模型的控制设计。其中几何关系可以分为,纯追踪算法、前轴反馈和后轴反馈算法。基于模型可以分为运动模型和动力学模型,控制算法可以使用LQR优化或者使用MPC。

本文介绍常见几种路径跟踪算法,并分析各自的优势。目前主要分为基于几何关系控制设计和基于模型的控制设计。其中几何关系可以分为,纯追踪算法、前轴反馈和后轴反馈算法。基于模型可以分为运动模型和动力学模型,控制算法可以使用LQR优化或者使用MPC。
本文介绍离散时间有限范围内的LQR(Linear Quadratic Regulator)算法求解过程. 
本文主要讲述基于运动学模型的车辆路径跟踪,并使用LQR算法求取最优控制率。
本文主要分析CRTP协议的结构,对该协议结构的理解,有助于后续的数据扩展和对软件架构的理解。为了和Crazyflie通信,Crazyflie 飞控中提出一种高层次的协议叫做 CRTP (Crazy RealTime Protocol)。这种简单的协议使用一些可以收发数据的双向目标端口,但是大都时候通信由主机发起。
嵌入式软件开发主要包括编译(build)、调试(debug)和烧录(flash)三个步骤。本文结合crazefie项目,说明开发流程。
本文主要分析crazyflie项目的目录结构,并对主要目录作了简要说明。
本文总结了汽车领域常用汽车术语的缩写,后续会继续补偿完善。
| 缩写 | 英文名称 | 中文名称 |
|---|---|---|
| APA | Auto Parking Assistant | 自动泊车辅助系统 |
| RPA | Remote Parking Assist | 遥控泊车辅助 |
| HPA | Home zone Parking Assist | 家庭区域泊车辅助 |
| PIC | Parking In Control | 泊入控制 |
| POC | Pull Out Control | 泊出控制 |
| L-ASP | Low Speed Autonomous Searching Parking slot | 低速自动寻找车位 |
在实际控制系统中,包括直流电机和飞机控制,通过连续或者平滑控制信号来避免控制抖振都是非常重要的方式。进一步说,飞机的气动表面不能高频来回运动,但同时对于边界模型不确定且存在外部干扰的控制系统,渴望保持其鲁棒性或不敏感度。
基于非时间的参考的路径跟踪方法最早应用于机器人的路径跟踪系统,通过引入非时间参考量代替时间参考量,解决传统路径跟踪方法中将期望轨迹视为时间函数的问题。该方法选择移动机器人实际路径在某参考系下的x 轴投影作为非时间参考量。
考虑简单的单位质量块的一维运动模型,使用位移和速度状态变量进行描述。
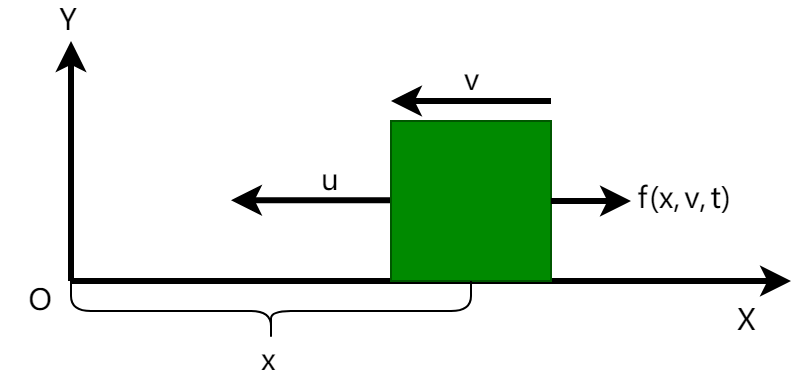
定义位移变量\(x_1 = x\)和速度变量\(x_2 = \dot{x_1} = v\),运动模型的微分形式使用\(x_1\)、\(x_2\)表示如下:
\[ \left\{ \begin{array}{rl} &\dot{x_1} = x_2& x_1(0)=x_{10}\\ &\dot{x_2} = u + f(x_1,x_2,t) &x_2(0)=x_{20} \end{array} \right.\tag{1} \]





