感知-超声波
概述
在自动驾驶使用场景中,一般会使用各类传感器(摄像头、激光雷达、毫米波雷达和超声波雷达等)来感知周围环境信息,传感器收集的大量信息,通过各类算法最终融合到一个真实的语义地图上,下游模块通过该语义地图做相应的规划和决策。

超声波
超声波雷达是一种利用声波反射原理进行测距的传感器,主要用于短距离测量,一般测量范围在0.1m-5m之间,具有体积小、成本低、安装方便等特点。
测距原理
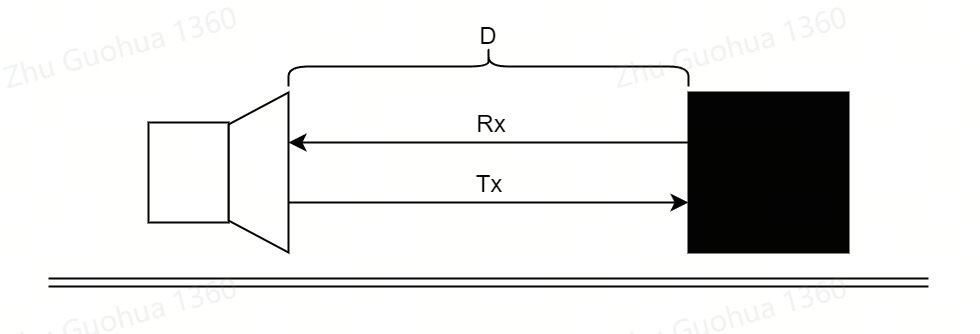
\[ D = T_{f} * V_{s} * k \]
其中,\(T_f\)表示超声波的飞行时间,及超声波走完距离\(D\)所需的时间,\(V_s\)表示声音在空气中的速度,\(k\)表示一个接近0.5的常数,一般由传感器的结构决定(收发压电换能器的位置)。
声速
声波在空气的速度与温度的关系近似如下: \[V_s\approx20.055*\sqrt{T}\] 其中,\(T\)表示绝对温度,单位\(K\)。 当温度在 \(0-40℃\)范围变化是,声速在\(330-360 m/s\)范围内变化,因此温度应作为距离的测量的关键因素考虑,故一般要求安装温度传感器获取环境温度。
声波特性
- 频率:声波的频率是指每秒钟内声波完成的全振动次数,单位为赫兹(Hz)。人耳能听到的声音频率范围大约在20 Hz到20,000 Hz之间。超声波传感器通常工作在更高的频率,如几十kHz甚至几百kHz。
- 周期:声波的周期是指完成一次全振动所需要的时间,单位为秒(s)。频率和周期的关系是互为倒数,即 \(f = \frac{1}{T}\),其中\(f\)表示频率,\(T\)表示周期。
- 波长:声波的波长是指在空气中传播时,两个相邻的同相位点之间的距离,单位为米(m)。波长和频率、声速的关系是 \(λ = \frac{v}{f}\),其中\(λ\)表示波长,\(v\)表示声速,\(f\)表示频率。
- 声速:声速是指声波在介质中传播的速度,单位为米每秒(m/s)。不同介质的声速不同,例如在空气中,声速约为340 m/s;在水中,声速约为1,500 m/s;在钢铁中,声速则高达5,000 m/s以上。
- 振幅:声波的振幅是指声波的最大位移,单位为帕斯卡(Pa)或牛顿每平方米(N/m²)。振幅越大,声音的响度越高;振幅越小,声音的响度越低。
超声波在不同介质下的传播特性如下:
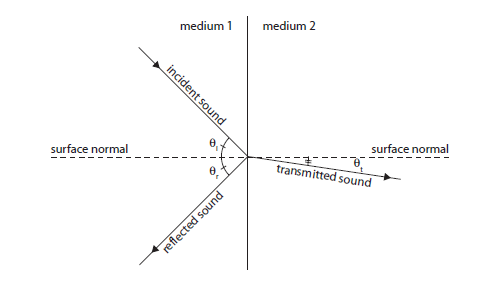
反射特性
如下图所示,超声波反射一般会遇到如下场景:

墙面反射
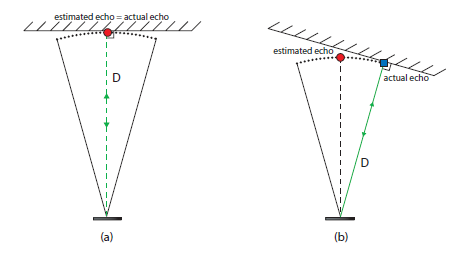

墙角反射

边沿反射

不同场景下,不同入射角下,回波强度如下:  实际扫描数据如下:
实际扫描数据如下: 
内部结构

接口定义

总线方式

长距超声

通信协议



短距超声


通信协议


总体布局

安装要点



