crazyflie-硬件分析
概述
本文主要对crazyflie飞控硬件原理图设计进行简单的分析,包括电路原理、参数选型和PCB设计等。

原理图分析
微处理器单元
选型
关于主控芯片的选型采用ST公司F4系列处理器,该系列处理器主要有三个产线,分别为进阶产线、基础产线和入门产线。基于性能和成本考虑,飞控设计选用基础产线系类,该系类主控拥有210 DMIPS,与进阶产线的225 DMIPS差距不大。由于摄像头接口外设并不需要,所以选择最基本的STM32F405系列主控就可以满足性能要求。
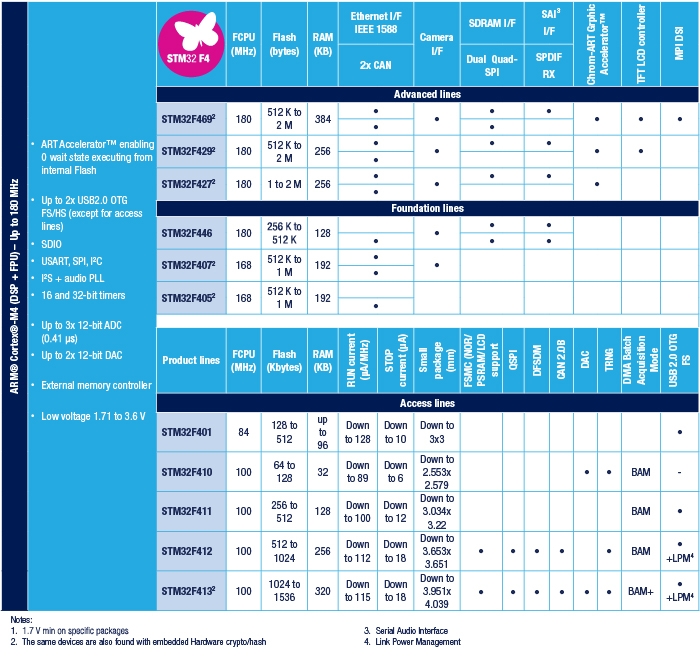
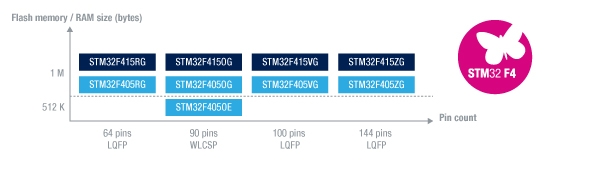
由于迷你四轴对引脚需求较少,可以选择下图64引脚的RG系列封装。
芯片外设如下:
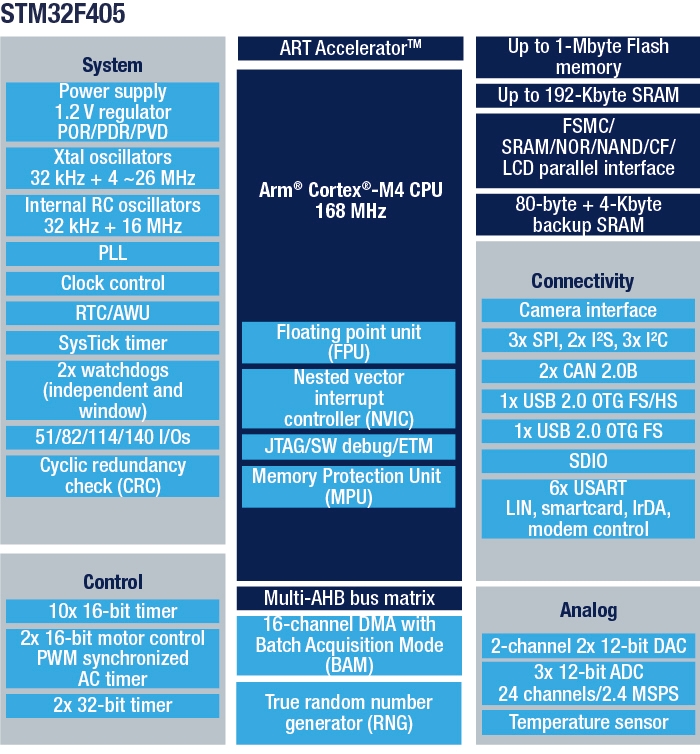
飞控中主要用到的通信外设包括IIC、SPI、USART和USB,控制相关外设包括PWM。
芯片供电分析
复位电路
晶振
Boot模式
传感器单元
惯性测量单元(IMU)
- Gyroscope(陀螺仪)
| 参数 | BMI088 | ICM20602 | 单位 |
|---|---|---|---|
| TCO(零速率偏移随温度的变化) | 15 | 10 | mdps/K |
| TCS(零敏度随温度的变化) | 0.03 | 2 | %/K |
| 零速率偏置 | 1 | 1 | dps |
| 输出噪声 | 0.1 | 0.04 | dps |
| 偏差稳定性 | < 2 | °/h |
- Accelerometer(加速度计)
| 参数 | BMI088 | ICM20602 | 单位 |
|---|---|---|---|
| TCO(零速率偏移随温度的变化) | 0.2 | xy:0.5 z:1 | mg/k |
| TCS(零敏度随温度的变化) | 0.002 | 1.5 | %/K |
| 零重力偏置 | 20 | 25-40 | mg |
| 噪声频谱密度 | z:190;x,y:160 | 100 | ug/Hz |
| 输出噪声 | 2.4 | 1.0 | mg |
| 非线性度 | 0.5 | 0.3 | %FS |
| 跨轴灵敏度(Cross-Axis Sensitivity) | 0.5 | 1 | % |
- 非线性度:理想情况下,电压与加速度之间是线性关系,用器件的灵敏度来描述。 非线性度衡量实际灵敏度与理想的恒定灵敏度之间的偏差,用相对于满量程范围(%FSR)或正负满量程(%FS)的百分比来表示。 通常,FSR = FS+FS。 ADI加速度计的非线性度非常低,绝大多数情况下可忽略不计。
- 跨轴灵敏度:衡量对某一轴施加一个加速度时,在另一轴上产生多大的输出,通常表示为百分比。 两个轴之间的耦合是由对齐误差、蚀刻不精确性和电路串扰共同造成。
高度测量单元
- 气压计
| 参数 | BMP388 | ICP101 | 单位 |
|---|---|---|---|
| Relative Accuracy(相对精度) | 8 | 3 | Pa |
| Absolute Accuracy(绝对精度) | 50 | 100 | Pa |
| TCO(温度偏移系数) | 0.75 | 0.5 | Pa/k |
| Resolution(解析度) | 0.016 | 0.01 | Pa |
电机驱动单元
由于mini四轴一般采用空心杯电机,驱动电路相对简单。方案设计中选用简单的MOS电路驱动,具体形式如下:
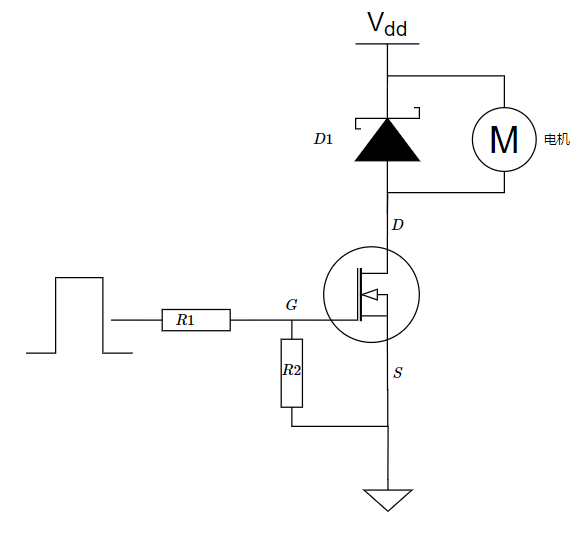
由上图可知,选用NMOS搭建驱动电路,参考CJ2302数据手册知,\(V_{gs}\)阀值为\(0.95V\),\(GS\)驱动电流\(I_{gss}=\pm100nA\)。所以选取电阻\(R1\)和\(R2\)参数时,为了减小\(DS\)端的导通电阻,需要保证\(V_{gs}\)尽可能大。
为了满足驱动电流\(I_{gss}\)的需求,电阻\(R1\)需要足够小,几欧姆的数量级即可。电阻\(R1\) 如果选取太小数值,又会增大导通过程产生的振铃,太大可能会不满足瞬间驱动电流,无法导通。
图中二极管\(D1\)用于续流二极管,当NMOS管关闭时,电机内部可以等效为一个电感,与二极管\(D1\)组成一个放电回路,释放电机停止过程中的电流,避免对MOS管的损坏。
无线通信单元

如上图所示,51与52系列的主要功能对比,对于mini飞控来说,51系列芯片性能已经足够使用。目前由于对车规级认证无要求,且无需ANT协议,所以选取nRF51系列无线芯片中的nRF51822 SoC。
设计中采用RFX2411N收发一体的驱动器。
电源管理单元
电池管理芯片
设计中选用电池管理芯片BQ24075,充电电流1.5A,支持一个电池。
线性电源
无线通信模块采用NCP702SN30线性电源芯片单独供电,传感器模块采用LP2985线性电源芯片单独供电。