控制算法-滑模控制介绍
一维运动模型
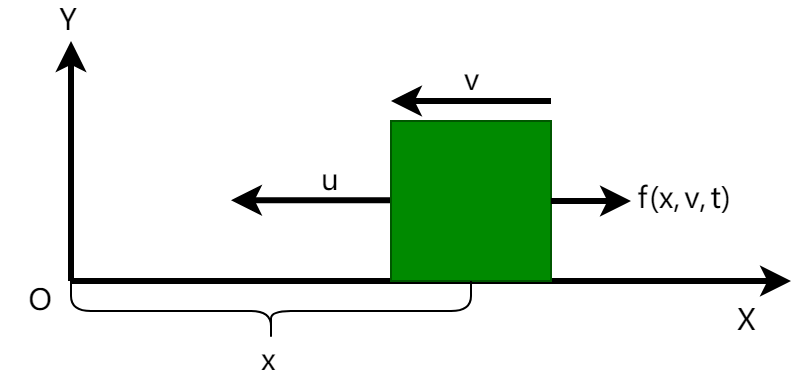
考虑简单的单位质量块的一维运动模型,使用位移和速度状态变量进行描述。
定义位移变量\(x_1 = x\)和速度变量\(x_2 = \dot{x_1} = v\),运动模型的微分形式使用\(x_1\)、\(x_2\)表示如下:
\[ \left\{ \begin{array}{rl} &\dot{x_1} = x_2& x_1(0)=x_{10}\\ &\dot{x_2} = u + f(x_1,x_2,t) &x_2(0)=x_{20} \end{array} \right.\tag{1} \]
其中,\(u\)代表控制力,干扰项\(f(x_1,x_2,t)\)包括干粘摩檫力的影响和一些未知的阻力,并假定有界。
\[ \rvert f(x_1,x_2,t)\rvert \leqslant L \gt 0 \tag{2} \]
问题关键在于设计一个反馈控制率\(u = u(x_1,x_2)\),驱动质量块渐进到达原点。换句话说,控制变量\(u=f(x_1,x_2)\)应该驱使状态变量趋近于0:\(\lim_{t \to \infty}{x_1,x_2} = 0\)。
这个问题看似简单,但对于存在未知的边界干扰项\(f(x_1,x_2,t)\)的情况下,使系统渐进收敛仍然存在着挑战。
状态反馈控制
例如,通过一个线性状态反馈控制率
\[ \begin{matrix} u = -k_1x_1 - k_2x_2, &\text{其中}(k_1>0,&k_2>0) \end{matrix}\tag{3} \]
在外界干扰项\(f(x_1,x_2,t)\equiv 0\),即不存在外界干扰时,系统可以实现渐进收敛。
仿真结果
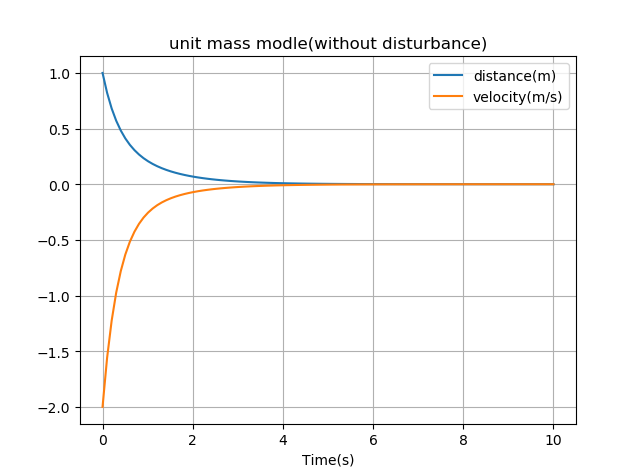
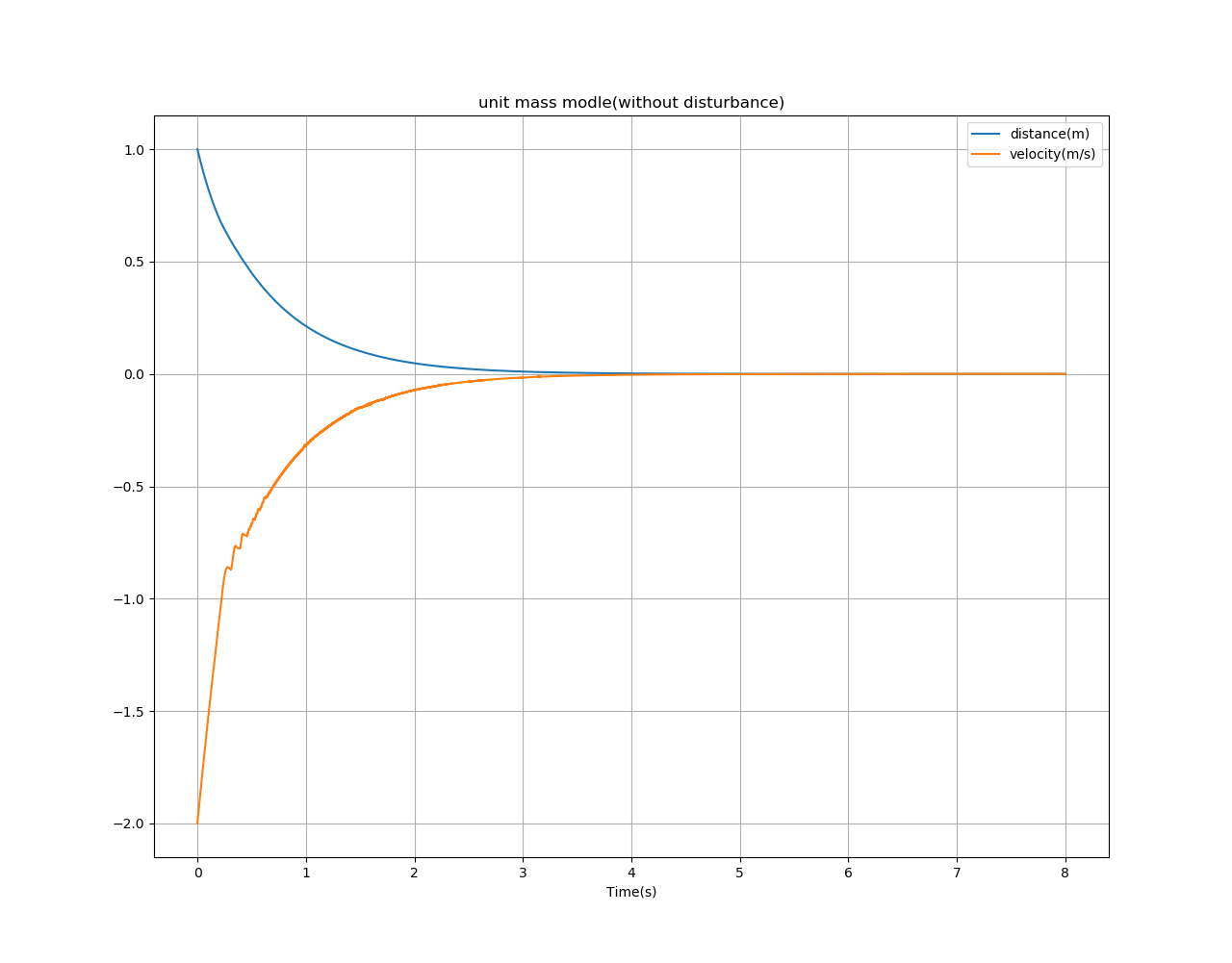
- 初始条件\(x_{10}=1\)、\(x_{20} = -2\)、控制率参数\(k_1=3\)、\(k_2=4\)。
如下图所示,是无外界干扰项时的渐近收敛效果图,图中蓝色线代表距离\(x\),橘黄色线代表速度\(v\),可以看出在反馈控制率\(u = u(x_1,x_2)\)的作用下,距离和速度值都趋近于0。
加入外部干扰\(f(x_1,x_2,t) = \sin(2t)\),响应波形如下:
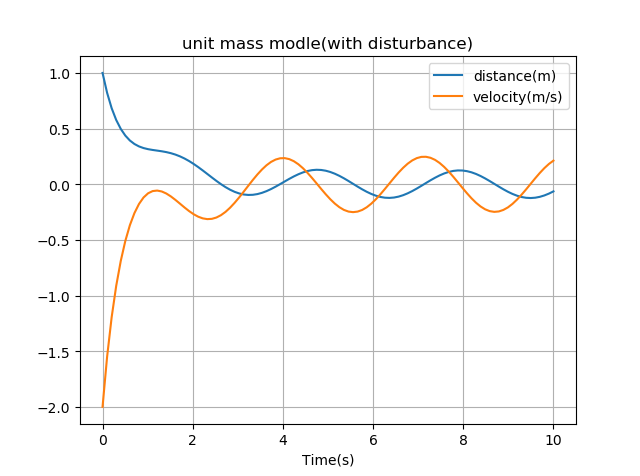
对于干扰项\(\rvert f(x_1,x_2,t)\rvert \leq L > 0\),产生的状态边界范围为\(\Omega=(k_1,k_2,L)\) 。
现在问题在于,仅使用未知扰动范围的知识是否可以解决规定的控制问题。
滑模控制的主要特性
介绍对于等式(1)系统,所需的补偿动力。一个较好的替代这些动力学特性的是齐次线性时不变微分方程:
\[ \begin{array}{rl} \dot{x}_1 + c \cdot x_1 = 0 ,& c > 0 \tag{4} \end{array} \]
因为 \(x_2(t) = \dot{x}_1(t)\),等式(4)的通用解和它的微分形式如下:
\[ \begin{array}{} &x_1(t) = x_1(0)\exp(-ct)\\ &x_2(t) = \dot{x_1}(t)=-c \cdot x_1(0)\exp(-ct) \end{array}\tag{5} \]
从等式(5)可以看出,\(x_1(t)\)和\(x_2(t)\)都是逐渐趋近于0。注意,无干扰项\(f(x_1,x_2,t)\)的状态补偿动力学是很明显的。如何获得这些补偿动力。
滑模变量
首先介绍一个等式(1)系统的状态空间的新变量(滑模变量):
\[ \sigma = \sigma(x_1,x_2) = x_2 + c \cdot x_1 \tag{6} \]
在给定等式(5)收敛率且存在有界干扰\(f(x_1,x_2,t)\)的情况下,为了使状态变量\(x_1\),\(x_2\)逐渐收敛于0,即\(\lim_{t \to \infty} x_1,x_2 = 0\),不得不通过控制率\(u\)使得等式(6)的变量\(\sigma\)在有限的时间内趋于0。
为了完成这个任务利用李亚普洛夫函数技术,结合等式(1)和(6)推动出关于滑模变量\(\sigma\)的动力学方程如下:
\[ \begin{array}{rl} \dot{\sigma} = c \cdot x_2 + f(x_1,x_2,t) + u ,&\sigma(0) = \sigma_0 \end{array} \tag{7} \]
稳定判据
李亚普洛夫函数(Lyapunov)形式如下:
\[ V = \frac{1}{2}\sigma^2 \tag{8} \]
为了使等式(6)在平衡点\(\sigma = 0\)处渐进稳定,根据李亚普洛夫稳定判据,必须满足下面两个条件:
- \(\begin{array}{rl}\dot{V} < 0 &(\sigma \neq 0)\end{array}\)
- \(\lim_{\rvert \sigma \rvert \to \infty}V = \infty\)
由等式(8)知,条件2明显满足。为了满足有限时间内渐进稳定,条件(1)可以修改为:
\[ \dot{V} \leq -\alpha {V}^{\frac{1}{2}} ,\qquad \alpha > 0 \tag{9} \]
在时间间隔\(0 \leq \tau \leq t\)内,对等式(9)所示的微分方程进行变量分离求积分得
\[ \begin{array}{rl} \int_{0}^{t} V(\tau)^{-\frac{1}{2}}dV(\tau) &\leq -\alpha*\int_{0}^{t}1 d\tau\\ 2*V(\tau)^{\frac{1}{2}}|_0^t &\leq -\alpha*\tau|_0^t\\ 2*[V(t)^{\frac{1}{2}} - V(0)^{\frac{1}{2}}] &\leq -\alpha*t\\ V(t)^{\frac{1}{2}} &\leq -\dfrac{1}{2}\alpha*t + V(0)^{\frac{1}{2}} \end{array}\tag{10} \]
故\(V(t)\)在有限时间\(t_r\)达到0时的边界,根据等式(26)得
\[ t_r \leq \frac{2V(0)^{\frac{1}{2}}}{\alpha} \tag{11} \]
因此,设计一个控制器\(u\)满足等式(9),使得变量\(s\)在有限的时间内趋近于0并在之后一直保持。
\(V\)的微分计算如下:
\[ \dot{V} = \sigma\dot{\sigma}=\sigma(c \cdot x_2 + f(x_1,x_2,t) + u) \tag{12} \] 假设 \(u = -c \cdot x_2 + v\),并将其带入等式(12)得 \[ \dot{V} = \sigma\bigl( f(x_1,x_2,t) + v \bigr) = \sigma \cdot f(x_1,x_2,t) + \sigma v \leq \rvert \sigma \rvert L + \sigma v \tag{13} \]
此处选择\(v = -\rho sign(\sigma)\),该函数表示为
\[ sign(x) = \left \{ \begin{array}{rl} & 1 & x > 0\\ & & &\\ &-1 & x < 0 \end{array} \right. \tag{14} \] 并且
\[ sign(0) \in [-1,1] \tag{15} \]
由于\(\rho > 0\),将其带入等式(13)得
\[ \dot{V} \leq \rvert \sigma \rvert L - \rvert \sigma \rvert \rho = \rvert \sigma \rvert(L - \rho) \tag{16} \]
考虑到等式(8)的形式,等式(9)可以表示为
\[ \dot{V} \leq -\alpha {V}^{\frac{1}{2}} = -\frac{\alpha}{\sqrt{2}}\rvert \sigma \rvert,\qquad \alpha > 0 \tag{17} \]
结合等式(16)和等式(17)得
\[ \dot{V} \leq \rvert \sigma \rvert(L - \rho) =-\frac{\alpha}{\sqrt{2}}\rvert \sigma \rvert \tag{18} \]
最终控制增益可以表示为
\[ \rho = L + \frac{\alpha}{\sqrt{2}} \tag{19} \]
所以最终使滑模变量\(\sigma\)在有限时间内趋近于0的控制率\(u\)为
\[ u = -c \cdot x_2 - \rho \cdot sign(\sigma) \tag{20} \]
- 显然,为了成功地设计出等式(20)中的控制器,\(\dot{\sigma}\)必须是控制率\(u\)的函数。当设计像等式(6)中的滑模变量时,这个特性必须考虑其中。
- 等式(19)中控制增益\(\rho\)的第一项被设计用来补偿有界干扰项\(f(x_1,x_2,t)\),同时第二项\(\frac{\alpha}{\sqrt{2}}\)负责确定滑模面的到达时间。\(\alpha\)的数值越大,到达时间就越短。
基本定义
- 滑模变量
等式(6)中定义的变量\(\sigma\)叫做 滑模变量(sliding variable)
- 滑模面
结合等式(4)和(5),可以重新写成如下形式: \[
\sigma = x_2 + c \cdot x_1 = 0, c > 0 \tag{21}
\] 相当于在系统(1)状态空间内的一条直线,这条直线被称为 滑模面(sliding surface)。
考虑到等式(9)可以等效于
\[ \sigma\dot{\sigma} \leq - \frac{\sigma}{\sqrt{2}} \rvert \sigma\rvert \tag{22} \]
等式(22)经常被称为 到达条件(reachability condition)。满足到达条件意味着等式(1)系统的轨迹趋向于滑模面,并在此后一直保持。
- 滑模控制
等式(20)所对应的控制率\(u = u(x_1,x_2)\)驱使状态变量\(x_1\)、\(x_2\)在有限时间\(t_r\)内趋近于滑模面,并在存在有界干扰项\(f(x_1,x_2,t)\)的情况下保持在该平面上,这个控制率\(u\)就叫做 滑模控制。并且对于所有的\(t > t_r\),系统都将产生一个理想滑动模态。
仿真结果
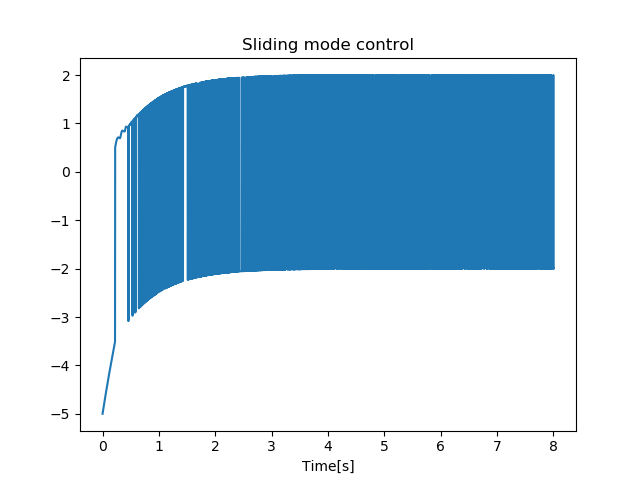
初始条件为\(x_1(0) = 1,x_2(0) = -2\),控制增益为\(\sigma = 2\),滑模参数为\(c = 1.5\)同时干扰项为\(f(x_1,x_2,t) = \sin(2t)\)。 使用等式(20)的滑模控制率的仿真结果如下:
下图表明,在有限的时间内,滑模变量趋近于0。

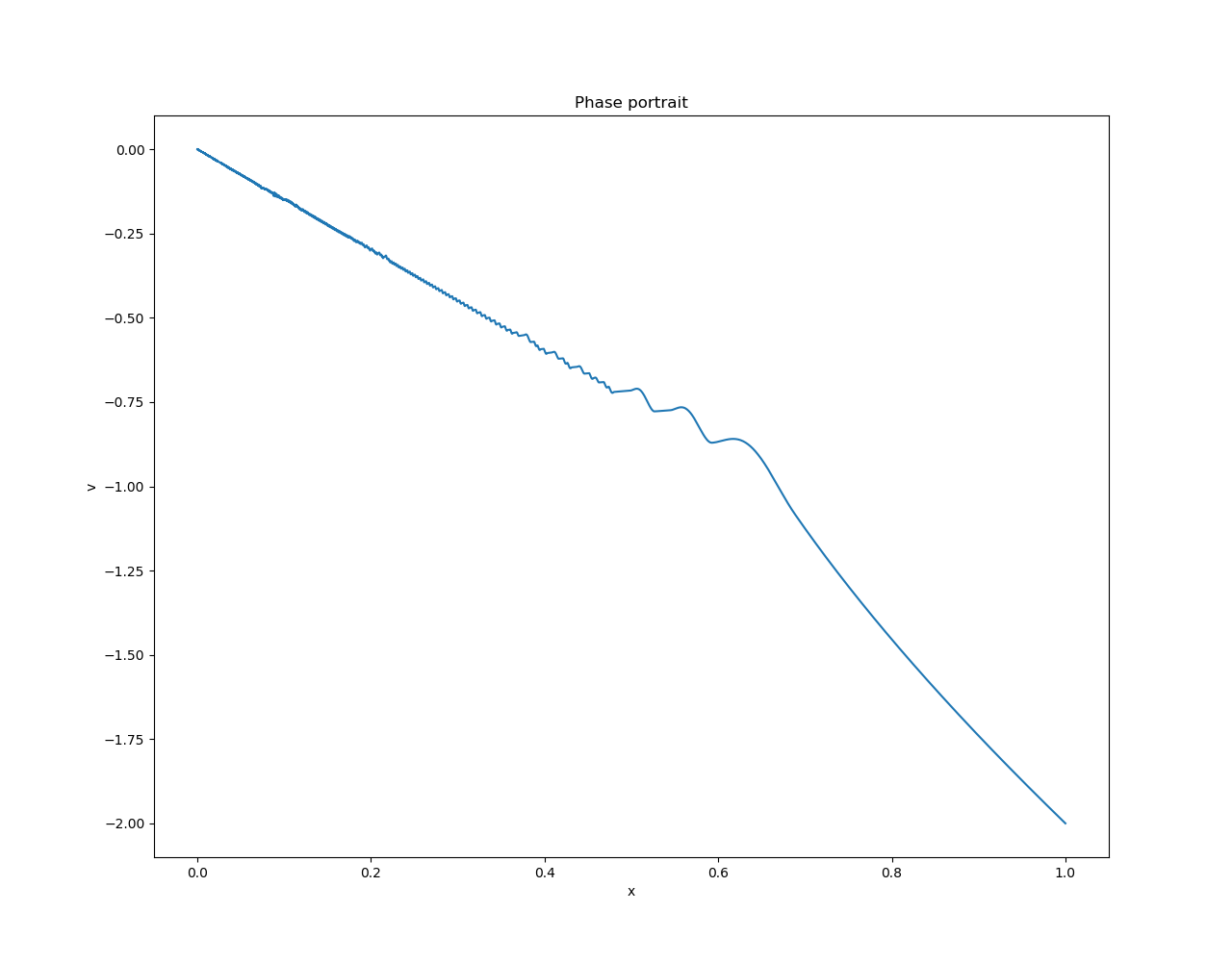
在干扰项作用的情况下,状态变量\(x\)和\(v\)逐渐收敛到0。
相图如下,展示了到达相位和滑移相位。
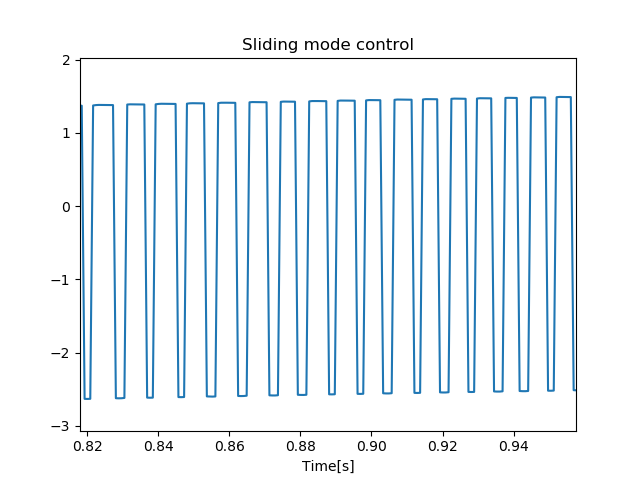
对上面的相图进行局部放大发现,在滑模状态下,状态变量存在小幅度且高频率的蜿蜒运动。
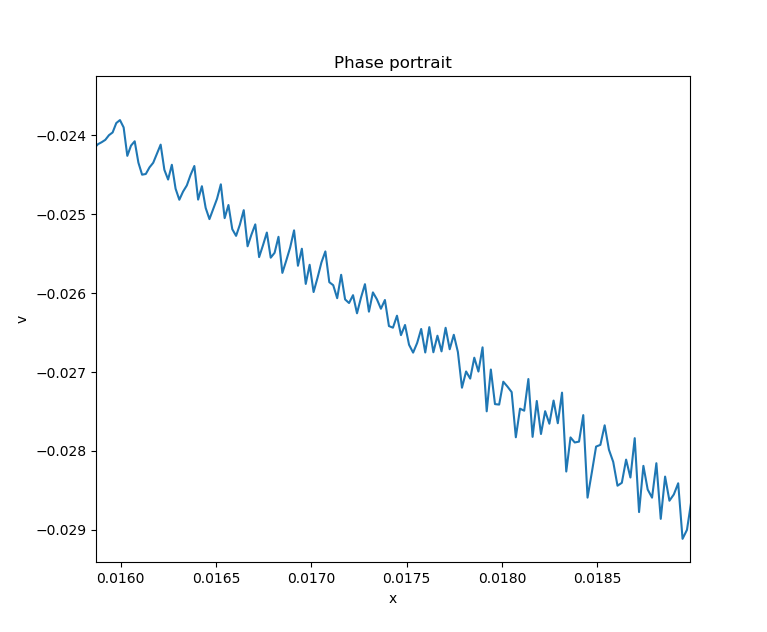
理想的滑模切换频率应该接近于无限并且蜿蜒运动的振幅接近于0。从下图可知,符号函数\(sign\)不完美表现为在滑动模态中产生了有限幅度和频率的之字形运动,原因在于计算机仿真的离散特性,这样的影响叫做 抖振(chattering)。