控制算法-动力学模型
概述
当车辆速度很高时,单车模型中前后轮的速度矢量不再与轮子方向一致。此时运动学模型就不能准确地描述车辆的运动状态,这就需要使用动力学模型对车辆进行建模。车辆单车模型中需要考虑两个维度的信息,这两个维度分别指代表车辆横向位置信息的\(y\)和表示车辆偏航角信息的\(\psi\)。下面分析过程中,先不考虑路堤角度的影响。 
受力分析
平动
首先假设车辆为一个质点,对该质点进行受力分析,并根据牛顿第二定律得
\[ ma_y = F_{yf}+F_{yr} \tag{1} \]
其中,\(a_y\)为车辆重心处\(y\)轴方向的惯性加速度,\(F_{yf}\)和\(F_{yr}\)为前后轮横向受到的力。平动过程中,有两种力共同作用于加速度\(a_y\):车辆延\(y\)轴产生的惯性加速度\(\ddot{y}\)和车辆绕旋转中心\(O\)旋转产生的向心加速度\(a_c=V_x\dot{\psi}\)。
\[ a_y = \ddot{y} + V_x\dot{\psi} \tag{2} \]
将公式(2)带入公式(1)得
\[ m(\ddot{y} + V_x\dot{\psi}) = F_{yf}+F_{yr} \tag{3} \]
转动
假设车辆为刚体,刚体绕重心转动,该运动过程使用力矩和转动惯量进行描述。 车辆绕z轴旋转产生的力矩平衡,对应的偏航动力学方程为
\[ I_z\ddot{\psi} = l_fF_{yf} - l_rF_{yr} \tag{4} \]
其中,\(l_f\)和\(l_r\)代表前后轮胎到重心的距离。
受力计算
上述等式(3)和(4)中都用到了轮胎横向受力情况\(F_{yf}\)和\(F_{yr}\),根据实验结果知,轮胎的横向力与小的滑移角存在正比例的关系,滑移角是轮胎方向与车轮速度矢量之间的夹角。
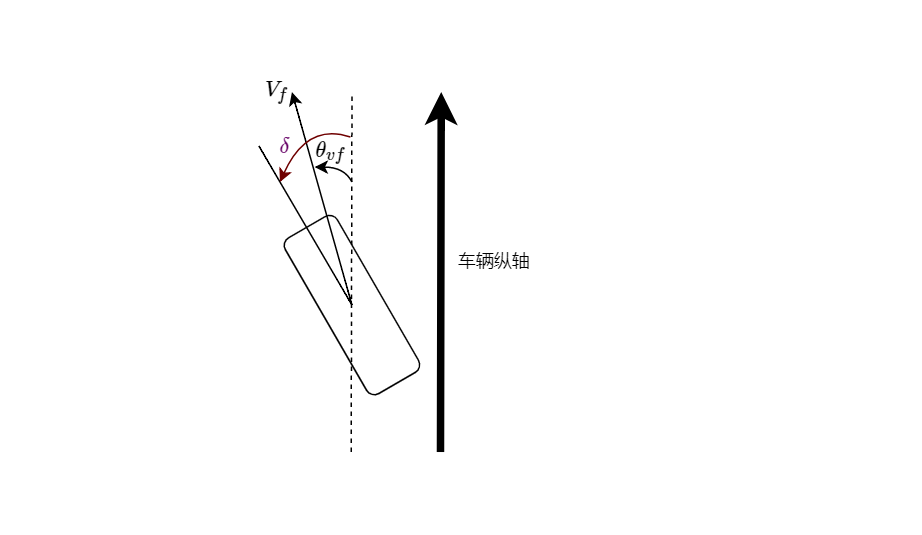
根据上图可知 \[ \alpha_f = \delta - \theta_{Vf} \tag{5} \]
其中,\(\theta_{Vf}\)代表速度矢量与车辆纵轴的夹角,\(\delta\)代表前轮转向角。 同理,由于后轮转向角\(\delta\)为0,故后轮滑移角为
\[ \alpha_r = -\theta_{Vr} \tag{6} \]
车辆前轮的横向力可以表示为
\[ F_{yf} = 2C_{\alpha f}(\delta - \theta_{Vf} ) \tag{7} \]
其中,比例常数\(C_{\alpha f}\)代表每个前轮的侧偏刚度。
同理后轮的横向力可以写为
\[ F_{yr} = 2C_{\alpha r}(-\theta_{Vr}) \tag{8} \]
其中,比例常数\(C_{\alpha r}\)代表每个后轮的侧偏刚度。
速度方向
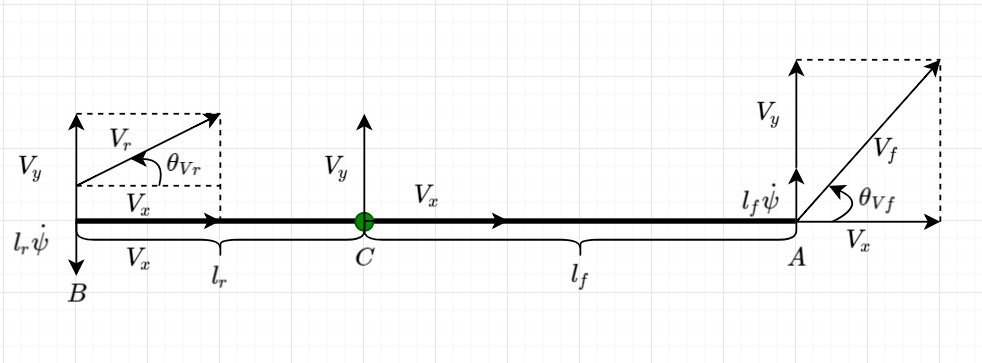
车辆平动产生的速度分量\(V_x\)和\(V_y\),以及绕点\(C\)转动产生的线速度\(l_f\dot{\psi}\)和\(l_r\dot{\psi}\)组成。根据上图得
\[ \tan(\theta_{Vf})=\frac{V_y + l_f\dot{\psi}}{V_x} \tag{9} \]
\[ \tan(\theta_{Vr})=\frac{V_y - l_r\dot{\psi}}{V_x} \tag{10} \]
由于通常情况下速度矢量的夹角很小,可以使用小角度近似原理得 \[ \theta_{Vf}=\frac{\dot{y} + l_f\dot{\psi}}{V_x} \tag{11} \]
\[ \theta_{Vr}=\frac{\dot{y} - l_r\dot{\psi}}{V_x} \tag{12} \]
微分方程
将等式(7)、(8)、(9)和(10)代入等式(3)中得
\[ m(\ddot{y} + V_x\dot{\psi}) = 2C_{\alpha f}(\delta - \frac{\dot{y} + l_f\dot{\psi}}{V_x} ) +2C_{\alpha r}(-\frac{\dot{y} - l_r\dot{\psi}}{V_x}) \tag{13} \]
等式(13)左右两边同时除以\(m\),分别提取 \(\ddot{y}\)、\(\dot{y}\)、\(\dot{\psi}\)和\(\delta\)项得
\[ \ddot{y} = -\frac{2C_{\alpha f } + 2C_{\alpha r}}{mV_x}\dot{y} - ( V_x + \frac{2C_{\alpha f}l_f- 2C_{\alpha r}l_r}{mV_x})\dot{\psi} + \frac{2C_{\alpha f}}{m} \delta \tag{14} \]
转化为矩阵形式如下
\[ \frac{\mathrm{d}}{\mathrm{d}t} \dot{y} = \begin{bmatrix} 0 & -\dfrac{2C_{\alpha f } + 2C_{\alpha r}}{mV_x} & 0 & - ( V_x + \dfrac{2C_{\alpha f}l_f- 2C_{\alpha r}l_r}{mV_x}) \end{bmatrix} \begin{bmatrix} y\\ \dot{y}\\ \psi\\ \dot{\psi} \end{bmatrix} + \frac{2C_{\alpha f}}{m}\delta \tag{15} \]
同理,将等式(7)、(8)、(9)和(10)代入等式(4)中得
\[ I_z\ddot{\psi} = 2l_fC_{\alpha f}(\delta - \frac{\dot{y} + l_f\dot{\psi}}{V_x} ) - 2l_rC_{\alpha r}(-\frac{\dot{y} - l_r\dot{\psi}}{V_x}) \tag{16} \]
等式(13)左右两边同时除以\(I_z\),分别提取\(\dot{y}\)、 \(\ddot{\psi}\)、\(\dot{\psi}\)和\(\delta\)项得
\[ \ddot{\psi} = - \frac{2l_fC_{\alpha f} - 2l_rC_{\alpha r}}{I_zV_x}\dot{y} - \frac{2{l_f}^2C_{\alpha f} + 2{l_r}^2C_{\alpha r}}{I_zV_x}\dot{\psi} + \frac{2l_fC_{\alpha f}}{I_z}\delta\tag{17} \]
等效的矩阵形式为
\[ \frac{\mathrm{d}}{\mathrm{d}t} \dot{\psi} = \begin{bmatrix} 0 & - \dfrac{2l_fC_{\alpha f} - 2l_rC_{\alpha r}}{I_zV_x} & 0 & -\dfrac{2{l_f}^2C_{\alpha f} + 2{l_r}^2C_{\alpha r}}{I_zV_x} \end{bmatrix} \begin{bmatrix} y\\ \dot{y}\\ \psi\\ \dot{\psi} \end{bmatrix} + \frac{2l_fC_{\alpha f}}{I_z}\delta \tag{18} \]
根据等式(15)和(18)得
\[ \frac{\mathrm{d}}{\mathrm{d}t}\left \{ \begin{array}{cccc} y\\ \dot{y}\\ \psi\\ \dot{\psi} \end{array} \right\} = \begin{bmatrix} 0 & 1 & 0 & 0\\ 0 & -\dfrac{2C_{\alpha f } + 2C_{\alpha r}}{mV_x} & 0 & - ( V_x + \dfrac{2C_{\alpha f}l_f- 2C_{\alpha r}l_r}{mV_x})\\ 0 & 0 & 0 & 1\\ 0 & - \dfrac{2l_fC_{\alpha f} - 2l_rC_{\alpha r}}{I_zV_x} & 0 & -\dfrac{2{l_f}^2C_{\alpha f} + 2{l_r}^2C_{\alpha r}}{I_zV_x} \end{bmatrix} \begin{bmatrix} y\\ \dot{y}\\ \psi\\ \dot{\psi} \end{bmatrix}\\+ \begin{bmatrix} 0\\ \dfrac{2C_{\alpha f}}{m}\\ 0\\ \dfrac{2l_fC_{\alpha f}}{I_z} \end{bmatrix}\delta \tag{19} \]
- 注意:上述动力学方程的推导建立在车辆滑移角很小的情况下,这时的轮胎作用力与滑移角可以近似为线性关系。当滑移角很大时,轮胎作用力与滑移角就不再是线性关系。
参考
- “vehicle dynamics and control”