超声波障碍物定位-库位角点
概述
基于纯超声的垂直车位检测存在一些技术瓶颈,比如超声波的更新频率较低、探测开角较大等,都是影响检测精度的关键因素。另外对于垂直车位,车辆头部情况复杂、存在各种结构的进气栅格、引擎盖的高度不一等,增大了超声检测的难度。基于上述传感器本身性能限制和探测环境的复杂性,一次性精确检测很难实现,目前常规算法检测精度大概在30cm左右。为了进一步提升超声波检测的精度,利用车辆泊车过程中的检测的超声数据,重新进行库位的定位。

超声重定位
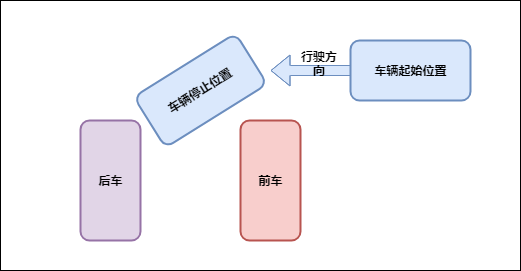
首先车辆先通过超声波传感器确定车位的大概位置,然后规划车辆进行倒车入库,在入库的过程中,进行前车车头边沿的重新检测,并通过尾部超声波进行后车的检测,当车辆离后车距离达到30~40cm时,车辆停止。通过后置的短距超声波,使用三角定位算法实现,进行后车边沿数据的采集。等待数据量足够时,一般可以设定50个数据点左右。停止超声数据的推送,开始进行边沿算法的计算,从而实现垂直车位的二次定位。
数据滤波
状态滤波
传感器本身会输出一些状态信号,如噪声干扰、硬件故障、盲区、振玲故障、通信故障和正常等状态。可以通过传感器输出的这些状态信号进行数据的一级滤波,只保留状态输出为正常的信号。
幅值滤波
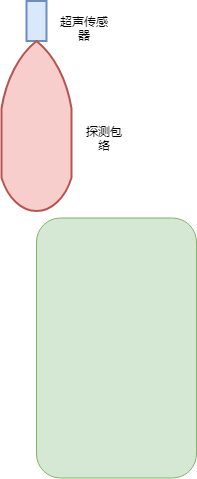
超声波的Level值反应了声波的回波强度,因此可以使用回波强度的大小,去滤除一部分无效信号,比如回波为0值数据。这些数据反应了未探测到障碍物,或者是障碍物的特殊结构反射了声波,特殊的材料吸收了声波。 比如某些车型的车头设计有很大的进气栅格,这种结构就会减少反射声波的强度,从而导致强度降低。
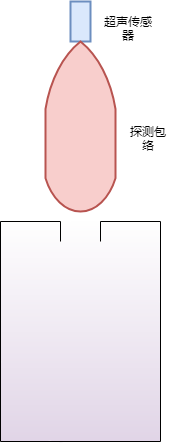
当超声波探测到车辆边沿时,此时由于很多回波反射方向变化,所以传感器接收到的强度变低。
通过一系列的滤波操作,可以得出以下图形。其中蓝色是滤波前的原始数据,黄色是滤波后的数据。可以从下图看出,通过滤波操作可以滤除一些无效信号点。 
边沿检测
对原始数据进行处理后,可以得到一组有效的超声信号,基于这组数据,可以进行车辆边沿的检测。
距离疏密程度
由于所有的坐标点都已经转化到了地面坐标系下,所以只需要进行x方向的疏密度分析。从下图可知,在车辆边沿处,点比较稀疏,有的地方存在很长一段距离无数据点。这种情况一般是车头处存在镂空的结构,或者声波发生了散射,导致声波强度减小。所以在确定车辆边沿点时,需设置一个疏密距离阀值,当距离值大于阀值时,才认为该点是边界的跳变点。 
数据分布
对于后车的边沿定位,使用的是车辆后方的短距传感器,该传感器使用三角定位原理,确定后车边沿的坐标值。可以从图中看出,图片左侧数据点描绘的是后车的边沿,可以通过数据的分布情况,及集中程度,确定最有可能车辆边沿的值。  如下图所示,是对上图x轴做了数值分布分析,可以看出,大部分点的x轴坐标都分布于区域5中,所以最后取区域5中的点作为可信的坐标点。
如下图所示,是对上图x轴做了数值分布分析,可以看出,大部分点的x轴坐标都分布于区域5中,所以最后取区域5中的点作为可信的坐标点。 
结论
库位角点定位算法适合泊车过程中的库位坐标重定位,方便在泊车过程中更新库位坐标。