双线性插值
概述
线性差值在实际应用非常广泛,比如航空航天行业中广泛用到气动数据的插值,经常会用到三线性到四线性的插值,在汽车行业很多标定数据而需要使用双线性插值,本篇文章主要讲述双线性插值的实现方式。

应用场景
本文基于车辆扭矩标定的应用场景来说明2维线性插值的具体应用,根据车辆的控制原理可知,车辆的目标加速度与当前车速和发动机输出扭矩有关,因此对车辆扭矩进行标定后,我们就可以得到一个根据当前目标加速度和车速,获得车辆输出扭矩的关系表。 如下表所示,只选取了目标加速度为正的部分标定数据,其中横向表示速度(m/s),纵向表示加速度(m/s2),表中的数据代表汽车扭矩输出(Nm)。由于速度只采样了[0.1,0.2,0.3,0.4,0.5,0.6,0.7]这几个数值点的数据,加速度也只采样了[0.06,0.09,0.1,0.12,0.13,0.15,0.2,0.21,0.24,0.26]这几组数据点的数据,如果想得到中间任意数值的数值,就需要使用双线性插值算法来获得。

如下表所示,如果当前需求的目标加速度为0.094m/s2,当前车速为0.36m/s,想得到当前输出扭矩值,按照表格所圈出的扭矩值,进行多次线性插值,求得理想的输出扭矩。

双线性插值原理
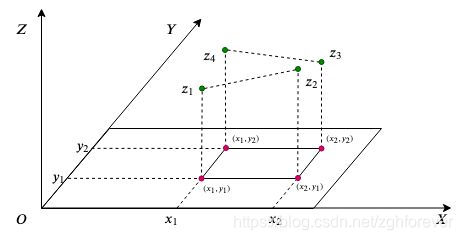
双线性插值算法,是在线性插值的基础上进行多次插值的结果。 如下图所示,假设插值点\({(x_i,y_i)}\)的坐标点\(x_i\)和\(y_i\)范围满足,\(x_1\le x_i \le x_2\),\(y_1\le y_i \le y_2\),其中\((x_1,y_1)\)对应数值为\(z_1\),\((x_2,y_1)\)对应数值为\(z_2\),\((x_2,y_2)\)对应数值为\(z_3\),\((x_1,y_2)\)对应数值为\(z_4\)。
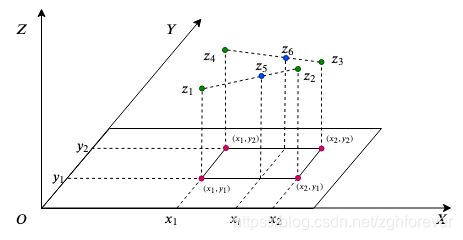
第一步,进行x轴方向的线性插值。当y取值\(y_1\)时,进行点\((x_1,z_1)\)和点\((x_2,z_2)\)之间的插值,得到插值点\((x_i,z5)\);同理y取值\(y_2\)时,进行点\((x_1,z_4)\)和点\((x_2,z_3)\)之间的插值,可得第二个插值点\((x_i,z_6)\)。
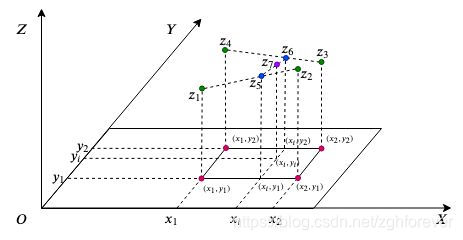
第二步,进行y轴方向的插值。依据新的插值点\((y_1,z5)\)和\((y_2,z_6)\),进行线性插值,得到插值点\((x_i,y_i,z_7)\)。此时的点\((x_i,y_i,z_7)\)就是双线性插值的最终结果。
软件实现
本文基于c语言去实现插值算法,数据结构采用简单的数组结构,不使用C++的关联容器属性去实现数据表的存储。
数据表的存储结构
数据结构使用三个数组进行数组的存储,其中两个数组分别存储横向的速度值和纵向的加速度值,另一个数组存储对应的扭矩值。
1 |
|
索引ID查找函数
输入参数 array :需进行数值匹配查找的数组 输入参数 num :数组的长度 输入参数 input :需要匹配的值 输出参数 before :匹配值的前数组边界ID 输出参数 before :匹配值的后数组边界ID
1 | void ArrayIndexFind(float *array,uint16_t num,float input,uint16_t *before,uint16_t *after) |
数据插值函数
1 | float InterpolateValue(float x,float x0,float y0,float x1,float y1) |
线性差值函数
1 | float Interpolation::InterpolationYZ(float y,float *y_tb,uint16_t y_num,float *z_tb) |
双线性插值函数
1 | float Interpolation2D(float x,float y,float *x_tb,uint16_t x_num,float *y_tb,uint16_t y_num,float *z_tb) |